OV7670で遊んでいるけど、手に入るモジュールはどれも望遠気味。


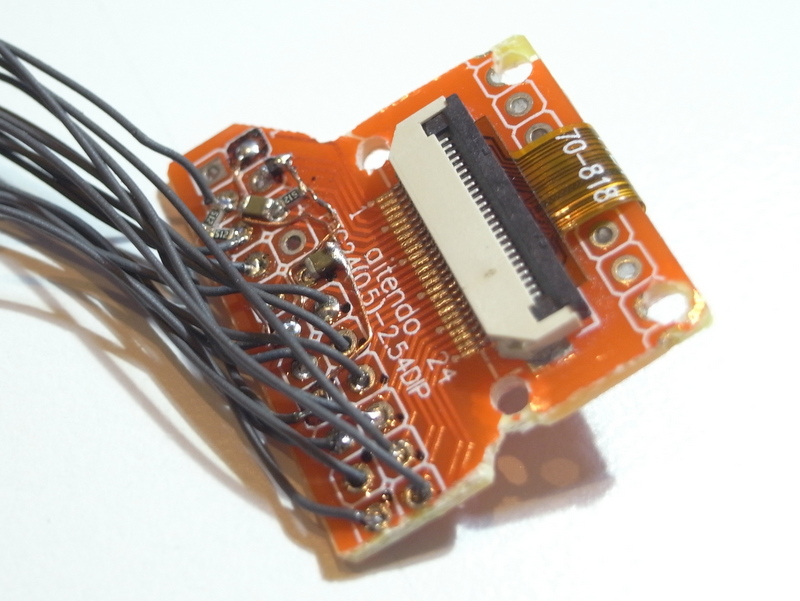
 レンズ一体型はFFCをコネクタに取り付けて、線を引き出す。 24ピンの変換基板を使う。
レンズ一体型はFFCをコネクタに取り付けて、線を引き出す。 24ピンの変換基板を使う。
 ピンアサインは、販売元の表どおりだったが、端子部を観察してみると、今回買ったモジュールは、10bit出力用の端子が削られている。
ピンアサインは、販売元の表どおりだったが、端子部を観察してみると、今回買ったモジュールは、10bit出力用の端子が削られている。
ちなみに、同じHDFという刻印のあるOV7725もピンアサ共通だった。
物によっては、来てるモジュールもある。今回のは変換基板でみたらAGNDとDGNDが導通しているタイプだったけど、ものによってはヒントがなく、泣く泣くチップを剥がしてピンアサを確認することになったり…。
 はじめはFFCの端子配列の規則性がよくわからなかったが、2列にしてみると結構わかりやすくまとまっている。
はじめはFFCの端子配列の規則性がよくわからなかったが、2列にしてみると結構わかりやすくまとまっている。
 FIFO/マイコン基板用に配線をする。 電源ラインの処理とリセット端子やプルアップ抵抗もつけて、トラ技カメラAにだいたい準拠させる。
FIFO/マイコン基板用に配線をする。 電源ラインの処理とリセット端子やプルアップ抵抗もつけて、トラ技カメラAにだいたい準拠させる。

これは、OV7670の素子面積が小さいためだ。 なので12mm径のレンズマウントに対応した焦点距離1.8mmの超広角レンズ(自動車のリアカメラ用)をつけても、画像が歪みまくる割には広角にならない。
手元のレンズ付きモジュール(トラ技頒布カメラA)と、aitendoで入手したレンズ一体型を比べてみた。


VGA RAW解像度で撮ってPCで表示したもの。
比べると、レンズ一体型のほうが広め。 手持ちの画角がわかるGX200で検証したところ、
レンズ一体型 約50mm
頒布カメラA 約72mm
頒布カメラはかなり望遠気味なようだ。 ここでは載せていないけど、FIFO付きのモジュールはさらに望遠だという噂。


 |
| OV7670と手配線FIFO基板、ATmega644P |
 |
画角テスト

画像1 頒布カメラA(付属レンズ)

画像2 レンズ一体型
VGA RAW解像度で撮ってPCで表示したもの。
比べると、レンズ一体型のほうが広め。 手持ちの画角がわかるGX200で検証したところ、
レンズ一体型 約50mm
頒布カメラA 約72mm
頒布カメラはかなり望遠気味なようだ。 ここでは載せていないけど、FIFO付きのモジュールはさらに望遠だという噂。

参考 GX200 画角50mm VGAで撮影。

参考2 OV7725 (レンズ一体型) レジスタ設定がまだ途中なので露出がうまくいってない。
画角は35mm程だった。
モジュールいろいろ

12mmレンズマウント 頒布カメラA (左は頑張ってフード削った)

レンズ一体型タイプ
レンズ一体型の準備


ちなみに、同じHDFという刻印のあるOV7725もピンアサ共通だった。
物によっては、来てるモジュールもある。今回のは変換基板でみたらAGNDとDGNDが導通しているタイプだったけど、ものによってはヒントがなく、泣く泣くチップを剥がしてピンアサを確認することになったり…。


これでコンパチに。
OV7670で経験を積んだら、素子面積が大きいOV7725に移行しようとおもっている。
OV7670だと、aliexpressでもたくさん販売されていて、場合によっては日本で輸入してる店より安いけれど、よく見ると古いリビジョンだったり、ピンアサと掲載画像が適当なことが多いので、日本の店で買ったほうが間違いが少ない。
以下は、レンズ一体型モジュール用の変換基板を設計して実装したもの。 ピンアサが共通だったOV7670とOV7725に対応した。 頒布カメラA相当の回路と、オシレータを搭載して、FFCケーブルで延長できる。


OV7670だと、aliexpressでもたくさん販売されていて、場合によっては日本で輸入してる店より安いけれど、よく見ると古いリビジョンだったり、ピンアサと掲載画像が適当なことが多いので、日本の店で買ったほうが間違いが少ない。
以下は、レンズ一体型モジュール用の変換基板を設計して実装したもの。 ピンアサが共通だったOV7670とOV7725に対応した。 頒布カメラA相当の回路と、オシレータを搭載して、FFCケーブルで延長できる。

