数センチ程度をレンジにもつ近接(proximity)センサは、赤外線LEDを備えた光センサなものが多い。 スマートフォンの受話動作の検知や、バックライト補正のために環境光(AmbientLight)の測定を行ったりしている。
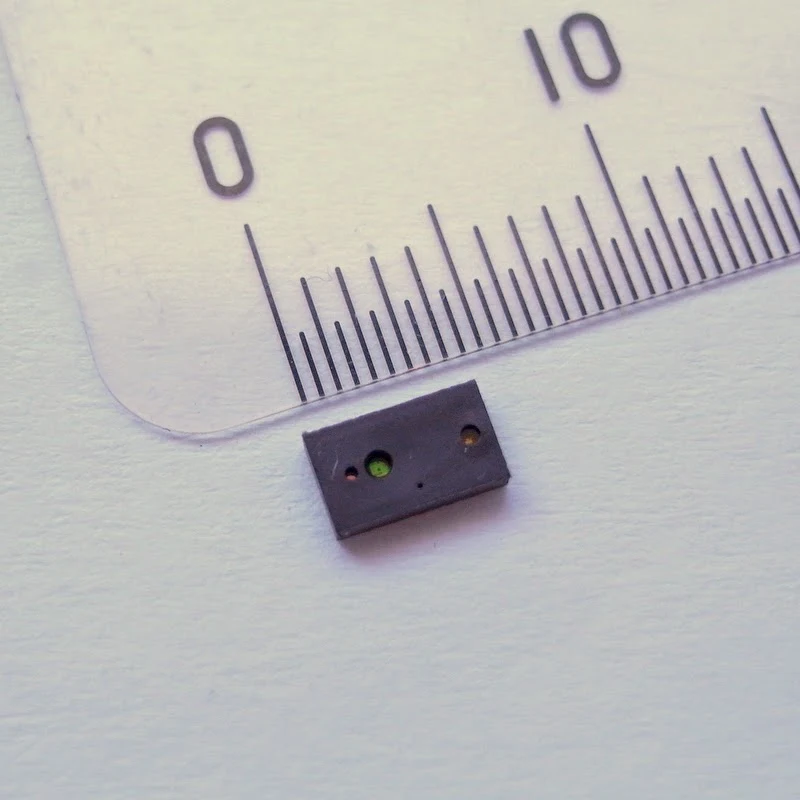
STのVL6180Xもカテゴリは近接&環境光センサだが、近接センサはTOF方式という、対象に照射した光の戻ってくる時間を測定するというすごいやつ。原理的に対象の反射率によらず誤差の少ない測定ができる。 それでいて全機能が米粒大のLGAパッケージに収まっている。
サイト http://www.st.com/web/catalog/mmc/FM132/SC626/PF260441?icmp=pf260441_pron_p3609p_sep2014&sc=proximitysensor
発表されて1年くらい経っていたけど 最近Mouserで購入できるようになっていた。
仕様
一回の測定には数ミリ秒程度かかる。(対象の反射率などで測定時間が変化する)
測定結果のレジスタは1バイトだけなので、そのままmm換算で読み出す。
保証されている距離は 10cm程度だが、環境光の影響が少なければ、20cm程度まで測定できた。
手ハンダの際にカプトンテープでパッケージ上面を保護していたが、剥がすのを忘れて動作させても、正確な値で測定できていた。 カバーグラスについてはそれほど心配しなくて良いみたい。
陽光下など、極端なSNRの環境でどれくらい測定できるかは、ユーザーの設定による。測定精度とのトレードオフで、環境光に対する耐性を上げることが可能とある。(レジスタ設定) ただし、強い光が入るとレンジエラーとなることが多かった。 屋外ロボットに応用できるかどうかは、これから試したい。
STのVL6180Xもカテゴリは近接&環境光センサだが、近接センサはTOF方式という、対象に照射した光の戻ってくる時間を測定するというすごいやつ。原理的に対象の反射率によらず誤差の少ない測定ができる。 それでいて全機能が米粒大のLGAパッケージに収まっている。

サイト http://www.st.com/web/catalog/mmc/FM132/SC626/PF260441?icmp=pf260441_pron_p3609p_sep2014&sc=proximitysensor
発表されて1年くらい経っていたけど 最近Mouserで購入できるようになっていた。
仕様
- 電源電圧(定格) 2.6~3.0V (試作では2.8Vで試した。 ただ、最高電圧は3.6Vまで)
- 測定時平均電流 1~2mA ピーク電流は~20mA
- インターフェース I2C
- 測定距離 ~約100mm (測定結果は8bitで格納)
- 環境光(ALS) 10万ルクス以上 (測定結果は16bit 20倍までのゲイン設定がある)
- ジェスチャ検知など
- 検出器はSPAD(単一光子アバランシェダイオード)で、データシートによれば、温度キャリブレーションを自動で行っている。
一回の測定には数ミリ秒程度かかる。(対象の反射率などで測定時間が変化する)
 |
| IRレーザーエミッタが光る様子。 クラス1のレーザー機器でもある |
保証されている距離は 10cm程度だが、環境光の影響が少なければ、20cm程度まで測定できた。
手ハンダの際にカプトンテープでパッケージ上面を保護していたが、剥がすのを忘れて動作させても、正確な値で測定できていた。 カバーグラスについてはそれほど心配しなくて良いみたい。
陽光下など、極端なSNRの環境でどれくらい測定できるかは、ユーザーの設定による。測定精度とのトレードオフで、環境光に対する耐性を上げることが可能とある。(レジスタ設定) ただし、強い光が入るとレンジエラーとなることが多かった。 屋外ロボットに応用できるかどうかは、これから試したい。