・・・・・
2014年の夏も終わる頃、ひと粒の人工衛星の軌道寿命が尽きようとしていた。
人工衛星が寿命を迎えるパターンは3通りある。人間が運用を停止したとき、機械が設計寿命を迎えたとき、もはや軌道を維持できなくなったときだ。
大型の気象観測衛星へ相乗りした軌道投入から半年が経過し、当初400kmあった軌道高度は250kmを切っていた。
低軌道は宇宙空間とされているが、同時に高度1,000kmほどまでは熱圏とよばれる大気構造の中でもある。軌道を変えるには推力が必要だが、ここでは希薄な大気との衝突が抗力を発生させ、軌道高度を低下させる作用をもたらす。低軌道衛星は高度によって数ヶ月〜数百年といったタイムスパンで空力ブレーキを受け続けているのだ。
緻密な螺旋降下が解けるとき、遂に軌道は消滅する。衛星は濃い大気圏とまともにぶつかることになり、圧縮された空気が溶鉱炉並みの熱をもつ瞬間が訪れ…。
国際宇宙ステーションや低軌道の大型衛星は推進系を用いて失った軌道高度を維持できるように設計されているが、小さな衛星はロケットが稼いでくれたエネルギーを失い続けるしかなかった。
もうすぐ、地球は1.5kgの質量を取り戻すだろう。
計画に携わった人工衛星の再突入が迫ったとある夕暮れ。
久しぶりに自宅で衛星追尾をすることにした。がらくた箱から手づくりの八木アンテナを掘り返す。 バルサ材を軸として、ホームセンターで買ったアルミと真鍮の棒をエレメントとして並べた簡素なものだ。何度か自作して、一番コストパフォーマンスが高く、作りやすい素材を組み合わせている。
保管していた間に曲がったエレメントを一つ一つ手でまっすぐに直す。
こんなアンテナでも、低軌道衛星が相手なら必要十分な性能がある。
久しぶりに自宅で衛星追尾をすることにした。がらくた箱から手づくりの八木アンテナを掘り返す。 バルサ材を軸として、ホームセンターで買ったアルミと真鍮の棒をエレメントとして並べた簡素なものだ。何度か自作して、一番コストパフォーマンスが高く、作りやすい素材を組み合わせている。
保管していた間に曲がったエレメントを一つ一つ手でまっすぐに直す。
こんなアンテナでも、低軌道衛星が相手なら必要十分な性能がある。
知覚を技術で拡張する遊びは、身体を駆使するのが楽でいい。 見えない衛星を追うために、八木アンテナに型落ちのスマートフォンを取り付けて、コンピューター支援の照準とする。アンテナから伸びる同軸ケーブルの先には、ハンディレシーバーを接続した。

装備を身に着け、建物の屋上へ上がる。 頭上には夜空が広がっているが、いつものように都会の灯火の輝きを受けて、淡い灰色に染まっていた。 星は少なく、一等星だけがかろうじて見えている。
ハンディレシーバーの電源を入れ、無線周波数をセットした。CWモードにして、車道の騒音に負けないよう、ボリュームつまみを回して音量を最大まで上げておく。 スピーカーから狭帯域のホワイトノイズが聞こえてくる。
これで、聴覚がとある周波数を中心とした電磁波スペクトルに拡張されたことになる。
衛星の信号は、観測者との相対速度差によりドップラーシフトが発生している。衛星の周波数に、あらかじめ出現時のドップラーシフト分の補正を加えておく。
これで、聴覚がとある周波数を中心とした電磁波スペクトルに拡張されたことになる。
衛星の信号は、観測者との相対速度差によりドップラーシフトが発生している。衛星の周波数に、あらかじめ出現時のドップラーシフト分の補正を加えておく。
追尾アプリの画面は、GPSの位置情報と姿勢センサの値を反映して、黒背景とグリッドで画面の向こうと同じ座標を映し出す。 アンテナを上下左右に振ると、方位角と仰角の数値が追従する。
コンピューター制御された地上局として、自己を拡張する準備は整った。 あとは待つだけだ。
北にアンテナを向けると、画面上の仮想の地平線から衛星軌道のパスをあらわす曲線が現れ、画面を二分した。 リハーサルとして、アンテナを画面上の軌道に沿って動かすと、パスは真上を横断し、南の地平線まで到達して空を2つに断ち切っている。
地球の自転により、衛星が上空を通過する位置は毎回変わる。今晩のパスはほぼ天頂を通過するが、このような好条件で衛星を観測できるのは、これが最後かもしれなかった。
宇宙的なスケールからすれば、200km真上を通過するというのはほとんど目と鼻の先の事象なのだが、速度と地球の形状が壁となって立ちはだかる。衛星が観測地に接近すればするほど、あっというまに地平線の向こうへ飛び去ってしまうのだ。
・- --- ・・・
待機をはじめて数分後、衛星を示す輝点がスマートフォンの画面上に現れた。高度の表示が近くの建物の屋根を越えた頃、ホワイトノイズの彼方から、聞きなれたリズムが浮かび上がってきた。

小さな衛星は、アマチュア無線のモールス信号によって自身の存在と情報を伝えるように設計されている。 人類が無線通信に利用してきた電離層の高度を周回しながら、人間にも解読可能なメッセージを発信しつづける遠隔無人局だ。
さかのぼること数年前、一枚のホワイトボードの殴り書きから、数十ページの計画書が生まれた。 チームが集まり、部品が基板に実装され、ソフトウェアが組み込まれて機能となった。配線で繋がれた基板群に電源が接続されてテストされ、削り出された金属筐体にネジ止めされた。アンテナと繊細な太陽電池を身にまとい、これから人工衛星となる機械は、いくつもの試験を経たのちにロケットの放出機構に収納され、南の射場へと旅立っていった。
自分の部屋の壁には、衛星が軌道から送ってきた最初の画像を引き伸ばして貼ってあった。 データ通信モードで数週かけて受信されたモザイク画だ。
衛星自らのアンテナが、地球を指し示しているかのように写り込んでいる。

腕とアンテナは天頂を指し示す。相対速度は最大となり、ビーコンの音程が目まぐるしく変わりはじめた。
半年前まで手元にあった装置と、第一宇宙速度ですれ違う。
この瞬間、衛星は地球の影の暗闇を漂いながら、星明かりと都市の灯に挟まれているのだろうか。 低軌道では、視野の大部分を地球が占めている。
ビーコンテレメトリは、定型文といくつかのデジタイズされた数値をゆっくりと伝えるだけだが、音声帯域に変換された雑音混じりの電波にもたくさんの情報が隠れている。
繰り返されるビーコンは、 強まるドップラーシフトに比例して少しずつトーンが変化していく。 時々レシーバーの周波数ダイヤルを回して追いかけなければならない。また、衛星自身の回転運動に伴い、信号強度が変化し、さえずりが海のうねりのように強弱を繰り返す。 映像はなくとも、雑音の中の信号品質を観察し、デジタルデータを物理値変換して読み解く作業を続けていくと、心眼が芽生え、衛星の様子をなんとなく把握できるようになる。
繰り返されるビーコンは、 強まるドップラーシフトに比例して少しずつトーンが変化していく。 時々レシーバーの周波数ダイヤルを回して追いかけなければならない。また、衛星自身の回転運動に伴い、信号強度が変化し、さえずりが海のうねりのように強弱を繰り返す。 映像はなくとも、雑音の中の信号品質を観察し、デジタルデータを物理値変換して読み解く作業を続けていくと、心眼が芽生え、衛星の様子をなんとなく把握できるようになる。
さかのぼること数年前、一枚のホワイトボードの殴り書きから、数十ページの計画書が生まれた。 チームが集まり、部品が基板に実装され、ソフトウェアが組み込まれて機能となった。配線で繋がれた基板群に電源が接続されてテストされ、削り出された金属筐体にネジ止めされた。アンテナと繊細な太陽電池を身にまとい、これから人工衛星となる機械は、いくつもの試験を経たのちにロケットの放出機構に収納され、南の射場へと旅立っていった。
自分の部屋の壁には、衛星が軌道から送ってきた最初の画像を引き伸ばして貼ってあった。 データ通信モードで数週かけて受信されたモザイク画だ。
衛星自らのアンテナが、地球を指し示しているかのように写り込んでいる。

腕とアンテナは天頂を指し示す。相対速度は最大となり、ビーコンの音程が目まぐるしく変わりはじめた。
半年前まで手元にあった装置と、第一宇宙速度ですれ違う。
心眼の視点を衛星に向ける。ゆっくりと自転する衛星に貼り付けられた三接合太陽電池が、遠くに散らばる恒星と、地表に灯された人類の営みを交互に反射し映しだしていく様子を想像した。
周波数の変化に聞き入る間に、衛星は天頂を通過した。 南の方角へ飛び去るとともに、レシーバーのダイアルを回す頻度が減っていく。通り過ぎてからも、軌道高度が低いせいで、普段よりも強力な信号が降り注いでいる。実は指向性アンテナで追わなくても、普通のホイップアンテナで捉えられる強度があった。
わずか10分程度の可視時間はあっという間に過ぎ、アンテナで南の地平線を指していると、画面内の衛星表示は地平線に触れて消えた。 現実の信号はわずかに地球表面を回折して届いていたが、ほどなく弱まり、リズムは再びノイズの海に沈んだ。
再突入間近のこの頃には、1日で10km近く降下しており、 一日に数度あるアメリカのレーダー観測の合間にも高度が変化し、軌道要素の予測誤差が増加していた。 より指向性の強い地上局の自動追尾では、信号を追いきれない場面が出てきていた。
大気圏突入が夜の側で始まるのであれば、機体を構成する様々な金属イオンのスペクトルが流星として夜空を一瞬だけ彩るのかもしれない。しかし、そのロマンチックな光景が現実になるには、衛星が日没後の観測地点を横切る最中に再突入をはじめる必要がある。制御落下していない人工衛星は落下予測に1日程度の誤差がつきもので、その期間で衛星は地球を十周以上も周回できてしまう。電波と違い、光学的に衛星を観測できる範囲はとても狭い。
・-・・ --- ・・・
2日後の朝方、軌道要素の予測高度が180kmを切ったあと、予定された可視運用時間に信号はなく、自動録音にはホワイトノイズのみが記録されていた。
日本列島の手前、太平洋のどこかで衛星は地球に戻ってきたようだ。
日本列島の手前、太平洋のどこかで衛星は地球に戻ってきたようだ。
久しぶりに大学の地上局にプロジェクトメンバーが集った。運用部屋の狭い空間では無線機と管制画面が並び、まだ稼働を続けていた。 半年前、打ち上げ直後の生々しい初期運用の光景が、記憶に色濃く残っている。
この部屋で、衛星の産声(ファーストボイス)に耳を澄まし、テレメトリデータを解析するために、皆で夜通し無線機のホワイトノイズを聞き続けた。 その後数日間は、生活音の中にモールス信号が聞こえる幻聴に悩まされたものだ。
モニタのひとつに表示された軌道予測ソフトの画面上では、レーダー観測による更新が途絶え、魂を失った軌道要素が、まぼろしの軌道を巡り続けていた。
APPENDIX
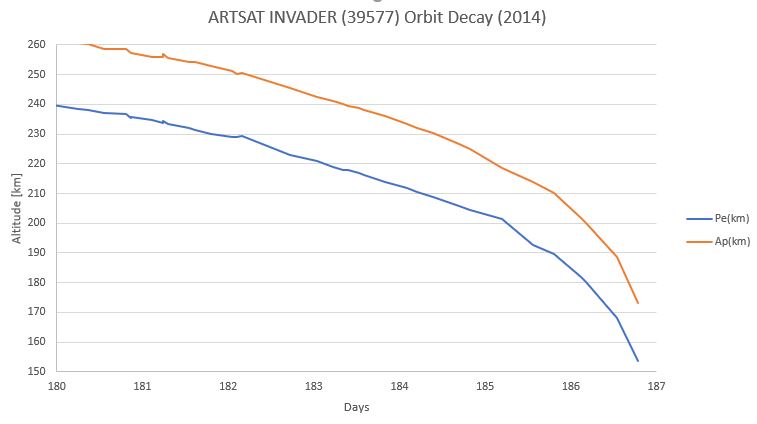
TLEによる軌道高度降下履歴
SpaceTrackで配信されているTLEを元に算出した実際の軌道降下のグラフ。 縦軸は高度、横軸は打ち上げからの日数を表す。 (Apとは軌道の遠地点高度、Peは近地点高度)

作中の電波受信はだいたい184日目(だったはず)。 落下1日前にも車で移動中にホイップアンテナのみで受信に挑戦し、傍受に成功している。
衛星諸元(運用期間): http://artsat.jp/project/invader/invader-specification
AR八木アンテナ http://blog.kemushicomputer.com/2011/06/droidsat.html