物体の温度を非接触で測定できる放射温度計を空に向けると、何の温度をはかることになるのだろうか。
NASAの教育用サイトに簡単な解説があった。
http://mynasadata.larc.nasa.gov/science_projects/measuring-the-temperature-of-the-sky-and-clouds/
どうやら、上空を通過する雲や、数キロ上空の大気からの赤外線放射を捉えることになるようだ。大気に塵や水蒸気量が増えると、赤外線放射も多くなる。
上空の気温がどの程度なのかについては、気象庁がラジオゾンデによる観測を行っていて、高層天気図として公開されている。 http://www.jma.go.jp/jp/metcht/kosou.html
本題としては、デジタルな放射温度センサMLX90614(3Vモデル)を手に入れて、簡単な動作テストのために、真上の空を24時間測定してみた。
この素子の観測波長が記載された資料を見つけられていないけれど、 "大気の窓"とよばれる、赤外線を透過する5~14μm付近を捉えるようになっているはず。熱放射に対して-70℃~380℃のレンジをもっているから、大気中なら申し分ない。
実験は昼12時から24時間、屋外での連続観測を実施。
MLX90614はセンサの温度と放射温度、カラーセンサはRGBと赤外線を捉えている。
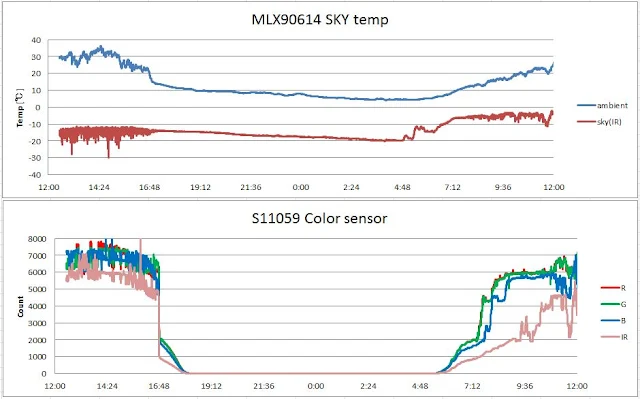
気象条件としては、前半は快晴、夜中も星空が見えていた。 明け方から薄雲が増えはじめ、午前中は曇り空になった。 夕方にカラーセンサが突然落ち込むのは、太陽が建物の影にはいったため。
遮蔽が無いため、日があたっているとセンサ自体が熱せられ、温度(ambient)が上昇する。 その間も放射温度は-15℃付近を示していた。 日没後はグラフが安定し、明け方に雲が通過したようなピークがみられる。
高層天気図を読むと、この日の-15℃の空気は、上空5~6kmの気温に相当しているようだ。
センサを裸で曝露させているので、視野が広い。 横の建物由来の赤外線放射もある程度捉えていそうな気がする。
少なくとも、上空の雲の量や大気の澄み具合が値に反映されることはわかった。 空をいろいろな波長で捉えるのは面白い。
実験的にお手軽に測定するまでは簡単だけど、屋外に常設するためには大きな課題がたくさんあるので、それはまた違うお話。
追記
放射温度計では、10:1といった比率で、対象までの距離と視野の広さが指標となっていて、比率が大きいほど、遠くでも限られた領域に絞って測定することができる(値段も高い)。
視野角が広いと、何の温度を測っているのかつかみにくいので、後日、市販の放射温度計を買った。 シンワの放射温度計 Gタイプ 30:1というスポット径で、価格帯的にはかなり狭い範囲を狙うことができる。
3脚穴を備えており、いろいろな温度管理に使えそうだ。
(とりあえず、猫舌なので熱いスープの飲み方の研究を始めた)

快晴の空だと、天頂付近では-60℃の測定限界に達することがある。
たいていは快晴の条件でも、-30~-40℃程度の日が多い。地平線に近づけたり、 雲が出ると温度が上昇する。
ちなみに太陽を狙うと、スポットが小さいので難しいが、快晴のお昼頃なら600℃といった表示になる。
視野の比較
剥き出しのMLX90614は、FOVが90°あるため広範囲の放射を拾う。 大気を見た場合、夏は太陽を避けるのがやや難しいのが不利な点。
逆に平均的な値をみるのには良さそう。 ロボットの6面につけるとか。

MLX90614は、型番から、鏡筒と光学系を備えたモデルが数種類ある。(オプションコードの3行目)
C FOV 30° 鏡筒部 8mm
F FOV 10° 鏡筒部 17mm
I FOV 5° 鏡筒部 20mm
長さの数値は、1M距離での視野の広さを表す。 後ろの数値は算出した大まかなスポット比となる。
市販の放射温度計は、だいたい10:1あたりが多いので、FOV換算だと6度以下というものが多いのだなぁ。 しっかりした製品はセンサ部も構造的に迷光対策されている。
天頂に向けておけば、夜でも曇りかどうか判定することができるので、天体観測のセンサとして使うと良いかもしれない。 ただし防水にするにあたり、窓に使える材料は熱赤外線を透過しなければならず、汚れ対策も必要なので、若干ハードルが高そう。
NASAの教育用サイトに簡単な解説があった。
http://mynasadata.larc.nasa.gov/science_projects/measuring-the-temperature-of-the-sky-and-clouds/
どうやら、上空を通過する雲や、数キロ上空の大気からの赤外線放射を捉えることになるようだ。大気に塵や水蒸気量が増えると、赤外線放射も多くなる。
上空の気温がどの程度なのかについては、気象庁がラジオゾンデによる観測を行っていて、高層天気図として公開されている。 http://www.jma.go.jp/jp/metcht/kosou.html
 |
| nLogにセンサをつなぐテスト |
この素子の観測波長が記載された資料を見つけられていないけれど、 "大気の窓"とよばれる、赤外線を透過する5~14μm付近を捉えるようになっているはず。熱放射に対して-70℃~380℃のレンジをもっているから、大気中なら申し分ない。
実験は昼12時から24時間、屋外での連続観測を実施。
MLX90614はセンサの温度と放射温度、カラーセンサはRGBと赤外線を捉えている。

気象条件としては、前半は快晴、夜中も星空が見えていた。 明け方から薄雲が増えはじめ、午前中は曇り空になった。 夕方にカラーセンサが突然落ち込むのは、太陽が建物の影にはいったため。
高層天気図を読むと、この日の-15℃の空気は、上空5~6kmの気温に相当しているようだ。
センサを裸で曝露させているので、視野が広い。 横の建物由来の赤外線放射もある程度捉えていそうな気がする。
少なくとも、上空の雲の量や大気の澄み具合が値に反映されることはわかった。 空をいろいろな波長で捉えるのは面白い。
実験的にお手軽に測定するまでは簡単だけど、屋外に常設するためには大きな課題がたくさんあるので、それはまた違うお話。
追記
放射温度計では、10:1といった比率で、対象までの距離と視野の広さが指標となっていて、比率が大きいほど、遠くでも限られた領域に絞って測定することができる(値段も高い)。
視野角が広いと、何の温度を測っているのかつかみにくいので、後日、市販の放射温度計を買った。 シンワの放射温度計 Gタイプ 30:1というスポット径で、価格帯的にはかなり狭い範囲を狙うことができる。
3脚穴を備えており、いろいろな温度管理に使えそうだ。
(とりあえず、猫舌なので熱いスープの飲み方の研究を始めた)

快晴の空だと、天頂付近では-60℃の測定限界に達することがある。
たいていは快晴の条件でも、-30~-40℃程度の日が多い。地平線に近づけたり、 雲が出ると温度が上昇する。
ちなみに太陽を狙うと、スポットが小さいので難しいが、快晴のお昼頃なら600℃といった表示になる。
視野の比較
剥き出しのMLX90614は、FOVが90°あるため広範囲の放射を拾う。 大気を見た場合、夏は太陽を避けるのがやや難しいのが不利な点。
逆に平均的な値をみるのには良さそう。 ロボットの6面につけるとか。

MLX90614は、型番から、鏡筒と光学系を備えたモデルが数種類ある。(オプションコードの3行目)
C FOV 30° 鏡筒部 8mm
F FOV 10° 鏡筒部 17mm
I FOV 5° 鏡筒部 20mm
長さの数値は、1M距離での視野の広さを表す。 後ろの数値は算出した大まかなスポット比となる。
市販の放射温度計は、だいたい10:1あたりが多いので、FOV換算だと6度以下というものが多いのだなぁ。 しっかりした製品はセンサ部も構造的に迷光対策されている。
天頂に向けておけば、夜でも曇りかどうか判定することができるので、天体観測のセンサとして使うと良いかもしれない。 ただし防水にするにあたり、窓に使える材料は熱赤外線を透過しなければならず、汚れ対策も必要なので、若干ハードルが高そう。