話題としては相当出遅れたが、2007年からはやぶさが捉えた小惑星25143 イトカワの形状データが公開されている。
HAYABUSA Project | Science Data Archive
http://darts.isas.jaxa.jp/planet/project/hayabusa/shape_ja.pl
これをモデリングソフトで見るにはSTLデータが読めるものが必要。
あと加工するために、DXFやその他フォーマットに変換できると便利なのだが、MeshLabというオープンソースのメッシュ形状編集ソフトが使えた。
http://meshlab.sourceforge.net/
MeshLab自体でもデータの閲覧が可能。最大となる1,579,014頂点のデータも少々時間はかかるが読み込んで変換できる。 ピーナツをグリグリ動かして眺められる。
Shade12.0.2ではDXFがエラーになるらしくどのサイズでもハングアップするので、Wavefront obj形式にしたところ大きなイトカワも表示できた。(64bit版にて)
表面材質をいじってレンダリングしてみた。

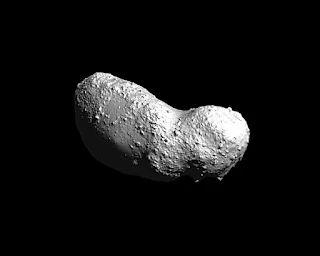
なにもしないと光沢がキツすぎて、てかてか光った蝋細工みたいになりがちなので、材質はいろいろ試行錯誤できそうだ。
読み込み時にサイズを指定するが、900~1000倍のどこかで取り込めば本物のイトカワ(長軸で約535m)と同じスケールになる。

Shadeで対天体静止中の宇宙船視点のレンダリングをして見た。 宇宙船を1.5km離れたところに配置して、100mm望遠でレンダリング。
黒いのは宇宙船の影だった。 はやぶさみたいに小惑星に影が落ちている。
HAYABUSA Project | Science Data Archive
http://darts.isas.jaxa.jp/planet/project/hayabusa/shape_ja.pl
これをモデリングソフトで見るにはSTLデータが読めるものが必要。
あと加工するために、DXFやその他フォーマットに変換できると便利なのだが、MeshLabというオープンソースのメッシュ形状編集ソフトが使えた。
http://meshlab.sourceforge.net/
MeshLab自体でもデータの閲覧が可能。最大となる1,579,014頂点のデータも少々時間はかかるが読み込んで変換できる。 ピーナツをグリグリ動かして眺められる。
Shade12.0.2ではDXFがエラーになるらしくどのサイズでもハングアップするので、Wavefront obj形式にしたところ大きなイトカワも表示できた。(64bit版にて)
表面材質をいじってレンダリングしてみた。


ラッコと呼ばれる所以ですね。
なにもしないと光沢がキツすぎて、てかてか光った蝋細工みたいになりがちなので、材質はいろいろ試行錯誤できそうだ。
読み込み時にサイズを指定するが、900~1000倍のどこかで取り込めば本物のイトカワ(長軸で約535m)と同じスケールになる。

Shadeで対天体静止中の宇宙船視点のレンダリングをして見た。 宇宙船を1.5km離れたところに配置して、100mm望遠でレンダリング。
黒いのは宇宙船の影だった。 はやぶさみたいに小惑星に影が落ちている。