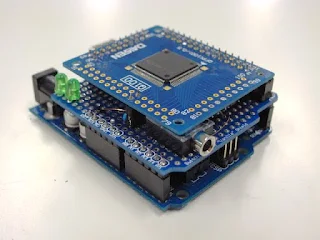
組み立てが完了。
ACT BRAIN製音声合成IC ATS001Bの組み立てその2。
作ってて気づいたこと: このIC変換基板は、スルーホールが細かくて普通の2.54mmピッチのピンヘッダが通らない。(買う時に気づけ・・・) 手元に丸ピンヘッダがあったので助かった。
<試験動作>
送信文字は、コマンド+内容 がメインなので、PCの端末からなにか入れてみる。
向こうからpasと返事が来て、音声が流れたら大丈夫。 ただし、コマンドが正常で、メッセージが間違っててもpasされる。
その声はどう聞いてもアレです。 棒読みも楽しいけど、音声記号というフォーマットにしたがえば、
かなり,よくよう;お/つけることが+できます。
このICはメッセージにひらがなと記号しか受け付けないので、漢字やローマ字は読んでくれません。
あと、文字コードはShiftJISでないといけないので、文字コードを設定できる端末から送らないと、hngと返事される(コマンドヘッダ異常)。 端末をTeratermに変更し、文字コードをSJISにしたところ治った。
これでやっと応用段階にはいれますね・・・。
 |
| 全容その一 |
作ってて気づいたこと: このIC変換基板は、スルーホールが細かくて普通の2.54mmピッチのピンヘッダが通らない。(買う時に気づけ・・・) 手元に丸ピンヘッダがあったので助かった。

最小限の構成とは、フィルタなし、アンプなし状態。 出力はコンデンサを経由してそのまま出している。 これでもイヤフォンなら駆動できる。
 |
| シールド部 |
変換基板を取り外したところ。 配置は適当で、かなり汚い。 プルアップ抵抗は下に直付け。
EEPROMはAtmelの64KBまで、とされている。24LC512を取り付け。
ソケットがもう一つ分空いているのは、フィルタ用の石を置くため。 寝ぼけながら配置したら、発振子を置く隙間が大変なことに^^;
シリアル回線は、ジャンパーピン経由で取り外し可能。 二つ付けてあるけど、本来はATS001B側のTXだけ外せば良い。 ソフトウェアシリアルでもいいですね。
PCから制御するときは、ArduinoからAVRを外そう。<試験動作>
恐る恐る電源を入れると、ちゃんと通信できた。 /SEL端子をHighにすると、強制的に34800bpsで通信。 ジャンパーピンをSPD端子にもつけた。 9600bpsに設定。
MSGゆっくりしていってね //送る文
>pas //ATS001Bからの返答向こうからpasと返事が来て、音声が流れたら大丈夫。 ただし、コマンドが正常で、メッセージが間違っててもpasされる。
その声はどう聞いてもアレです。 棒読みも楽しいけど、音声記号というフォーマットにしたがえば、
かなり,よくよう;お/つけることが+できます。
このICはメッセージにひらがなと記号しか受け付けないので、漢字やローマ字は読んでくれません。
あと、文字コードはShiftJISでないといけないので、文字コードを設定できる端末から送らないと、hngと返事される(コマンドヘッダ異常)。 端末をTeratermに変更し、文字コードをSJISにしたところ治った。
 |
| スピーカーをとりつけたところ |
確認がとれたので、アンプを取り付けて声出し。 ただし、ゲインがあってないので不明瞭極まりないことに。
イヤフォンを同時にとりつけて、マシな声になった。
これでやっと応用段階にはいれますね・・・。