オシロスコープを手にいれるはずが、ジャンク扱いのIntuos3 A4モデルを入手して店を出た。 どういう事なの… (足で部品屋を巡るとよくある事) PTZ-930 というらしい 型落ちとはいえ、未だに結構な値段で取引されている様子。

以前Bambooが突然死したときは、USBコネクタ付近の逆流防止ダイオードが導通状態になってわかりやすい故障だったが… 今回はどうなのだろう。 (自分で読み直したらA4サイズが欲しいと書いていた^^)


すべて拭き終えた後で、元通り組みなおしてPCにつないだ。 狙い通りチャタリング現象は消えて、不具合なく使えている。
本家に改めて作業をまとめてあります。

無駄に広い。 上で飯が喰える。 突っ伏して眠れる。
けちった分だけ何かがあるのは当然で、ドライバを入れて10分たって異変が起きた。
ブラウザの画面スクロールが暴走しだし、表示サイズが勝手に大きくなったり小さくなったり。
そうした入力の不安定が小康状態を挟んで続発。 いろんな機器を引っこ抜いたがやはりIntuos3が引き起こしていた。
投資は無駄にできないので、 お決まりの分解コース。
こういう固定入力機器が故障するための手順はそんなに多くない。 一応ドライバで認識し、先述のチャタリング状態が起きない間は普通に使えており、システムがIntuos3を見失っていないことから、電源トラブル、 ケーブルの断線の可能性は低い。 おまけにペンタブレットだから、可動部分はショートカットボタンだけ。 故障する確率が低い。 となると基板に異変があると仮定できる。
以前Bambooが突然死したときは、USBコネクタ付近の逆流防止ダイオードが導通状態になってわかりやすい故障だったが… 今回はどうなのだろう。 (自分で読み直したらA4サイズが欲しいと書いていた^^)
Intuosでも、内部部品は誘導コイル/制御基板、プラスチックのシート、金属板という構造で統一されていた。
開ける際、スライダーのフラットケーブルがタブレット面から伸びているので、ちぎらないよう注意する必要がある。 一気に開けないのがコツ。
異変はすぐさま見つかった。

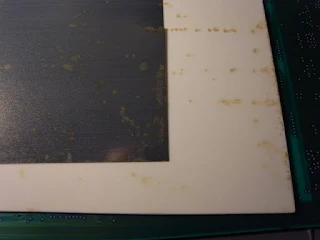
シートは金属板とコイルの間隙を埋める物なのだろう。 やわらかいプラスチックなのだが、
ところどころ錆が染み付いている。金属板も点々と錆びていた。
製造年月日は2007年で、3年目となるのだろうが、この錆はシートの基板に接する面にまで浮いていた。

基板の錆はスルーホール加工のドットと正確に対応しており、中にはショートと思しき派手な反応跡もある(写真)。基板をチェックすると錆が配線間を覆っている箇所が数カ所見つかった。 スルーホールを通じて表まで侵食されているケースもある。 謎のチャタリングはこれが原因と見て間違いなさそうだ。

対応策はとてもシンプル。 アルコールとティッシュ、メラミンスポンジで錆びた箇所を清掃しただけ。
幸い錆は基板表面にとどまっていたので、配線そのものがダメになったわけではなかった。
少しこするだけでかなりの錆は落ちた。 強力についた部分はドライバの先で配線の間に溝を穿つことで対処する。
シートの錆もスポンジでこすることですべて拭き取れた。 この素材が湿気を吸うのだろうか。 たぶんこの故障が理由で手放されたのだろう。
A4は広大だ… とはいえ、絵の腕がすぐに上がるわけではないのだろうな…