 |
| 中学の頃、ペイントで書いたシャトル |

宇宙船の造形について考えたことはあるだろうか。
物語の宇宙船は流線型で巨大なブースターがついていて、宇宙空間を自由に動き回る。
そんな造形にカッコよさを見出しつつも、現実の宇宙船はスペースシャトルをのぞけばみなビールの缶をつなぎあわせたような造形ばかり。疑問を持ったことはないだろうか。
低血糖で眠れないので、現実的な宇宙機のデザインが何に決定されているのか、基本法則は何かを架空宇宙機を描いたときに思い浮かべた条件から洗い出してみた。
もちろん、私はスターウォーズを目の敵にするほど狂信的ではない。 アバターの宇宙船にはわくわくした。無骨な宇宙機よりは、カッコいい宇宙船が好きだ。
ただそれらは空想であって、ハリウッドの力学/漫画物理学によって創造されたデザインであり、舞台設定も現実の宇宙機との接点はあまりない。
CNW推進、ハイパードライヴ、慣性駆動が実現するなら、ここに書くおはなしも古いものになっているはずだ。 幸か不幸か、2010年現在、これらはすべておはなしにとどまっているけれど。
<宇宙船を描いてみる>
ぼくのかんがえたさいきょうのうちゅうせん を脱するには、いくつかのシミュレーションを行う。
・建設時の制約がデザインの大枠を決める
・万能の宇宙船はない
・宇宙船は閉鎖系である
・巨大な推進力には、巨大な燃料タンクが必要だ
・無重力は上下左右の区別を無くしてしまう。 推進軸以外は
上記諸条件は絵を描くために勝手に導いたものだけれど、現実の宇宙船はだいたいこれに従っているはずだ。
「建設時の制約がデザインの大枠を決める」
ISSに関係する各国の補給船やソユーズといった往還機は、みな円筒形だ。これは打上げロケットのフェアリングの形状に依存している。ISSのきぼうユニットはスペースシャトルのカーゴベイに収まるサイズであった。四角いフェアリングがあれば四角くなるだろう。
建築物の高さ、デザインが掩蔽率、地価、建材によって決定されるように、宇宙船もまたロケットの搭載重量、フェアリング形状、容積、振動に左右される。 建設と宇宙開発は似ている。
材料だけ打ち上げて、軌道で組み立てる というレベルに達するためには、
・軌道上に恒久的基地がある
・軌道上に工業資源を加工できる工場がある
・建設に回せるだけの人的、資源的リソースがある
という条件が必要だ。 つまり、人間が宇宙進出を果たしていないといけない。
別に宇宙に限らず、地元の開拓史でも同じことだ。いきなり工場だけ作るわけにはいかないし、モノを運ぶ道路も要る。
いきなりかっこいい宇宙船を登場させることはできない。 T型フォードの時代にフェラーリを求めるのと同じ構図だと思う。
宇宙で支配的な要素として、一番高コストなのは地球と宇宙との移動コストだ。重力井戸の底から這い上がるだけで精一杯といっていい。ロケットは飼い慣らされた爆弾とよべるエネルギーを秘めており、グラム当たり一万円を超えるコストが掛かる。 そして大勢の人間が頭を使わなければ打上げは成功しない。 組織の気力も体力も使う事業だ。
宇宙建設業はもうしばらく待たないといけないようだ。
以上より、地上でモジュールを作ってそれを打上げ組み立てるという方式が一番安上がりで安全だ。 なにより水も空気も重力もある。 しばらくは空き缶を連ねたような宇宙船が続くだろう。
「万能の宇宙船はない」
ひとつの宇宙船が宇宙と空を駆けるというのは、かなりの無駄がある。
スペースシャトルの影響は大きく、物語にはシャトルを模した色々な宇宙船が出てきている。ただ、カッコいいけど現実的ではなかったとしていろいろな見解が出ている。
第一に安全性。 シャトルは脱出策が万全ではない。
ソユーズのような使い捨てロケットでは分離しているカプセル、推進系が一体化しているのだから、推進系と一蓮托生なのだ。 ロケットがしゃっくりを起こしたら、そこで終了である。
宇宙機でも万能を目指すより、それぞれの用途で最適化された機体のほうが無理が無い。 むしろ現時点では、万能を目指す技術的余裕は無いと思う。 特急より乗り継ぎ列車。
その延長で、宇宙空間と地球往還もちゃんと区別しないといけない。大気圏突入用のタイルをつけたままでは大分推力を無駄にしてしまうだろう。
宇宙は地球大気の延長ではない。 ほとんどの宇宙SFは地球で済む話を宇宙に置き換えたものばかりだ。 みたいなこと言ったのはスタニスワフ・レムだった。
付け加えると、宇宙の戦闘は大して面白くない。
また話がずれた・・・
「宇宙船は閉鎖系である」
軌道上の宇宙船は全て、乗員が搭乗中に必要な大気、食料、福利厚生を提供する必要がある。
外は真空、死の世界だ。 限られた宇宙船のリソースは、人間にも適用される。 空気、食料、娯楽、リサイクルシステム。 ささいなミスの代償が死という恐ろしい世界。
連絡船を除いて、軌道を数カ月~数年をかけ航行するタイプであったら、居住性も考慮しないと人間が死ぬ。 人間関係が壊れても、手っ取り早くその場を去るには真空を吸うしかない。大いなる使命があるか、冷凍睡眠でも無いと厳しいかも。 人間の維持コストを考えると、それなりのニーズがないと宇宙には進出しづらくなってきた。 アポロの時代は遠隔操作マニュピレータとしての価値があったが、これからはロボット探査が隆盛だからそうもいかない。 ロボットは空気も娯楽も精神科医もいらないのだから。
冒険心があるとはいえ、南極に住もうとは思わないように、宇宙で定住できるようになるには、地球からの持ち出しではなく、そこに独自の生態系が出来て、収支が吊り合うようになった時だろう。
「巨大な推進力には、巨大な燃料タンクが必要だ」
映画でも綺麗な宇宙船が多数あるけど、どこから燃料を得ているのか気になったりする。
ディープ・インパクトのメサイア号は、真面目に原子力推進部が設定されていた。 着陸船が残念なことにスペースシャトルの頭部で、全体としては頭を残して骨だけになった魚みたいなフォルムだったけど・・・。
あと放熱機構。 宇宙空間では空気の対流がないので、発生した余計な熱を、赤外線といった形で放出しないといけない。そうしないと熱で自壊することになる。
あの2001年宇宙の旅ですら、ACクラークもクーブリックも、 原子力推進には必須事項なのに、宇宙船に翼がつくと観客が頭を悩ませるということで、ディスカバリー号から巨大なヒートシンクを取り外してしまった。 宇宙では大気が無いため、面積の大きな放熱器で熱を赤外線やなにやらで宇宙空間に逃がすしかない。
まてよ、スペースシャトル後の観客は、逆に翼が無いことに頭を悩ませるのだろうか・・・
「無重力は上下左右の区別を無くしてしまう。 ロケットの推進軸以外は」
宇宙ステーションの居住区は、人間のために上下の区別を付けているものの、すべての壁が収納であり機器であったりする。 というわけで宇宙船の外装も、重力下では考えられない形状でもいいのだ。
ただし推進機構を備えている場合、重心がブレるとあまりよろしくないため、さして奇抜なデザインにはならないかも。
<おえかき>
 |
| ぼくのかんがえたさいきょうのうちゅうせん |
以上、偉そうなことを書いておいて描いたのがこれ。 すみません。
螺旋を描く配置で設置された太陽電池パネルが描きたかっただけだが、
その他の部分は駄文に準拠して作ったつもりである。
全長150メートル程度
原子力推進
定員10名程度(ミッションによる)
小型船2基(曳航、人員輸送、作業等)
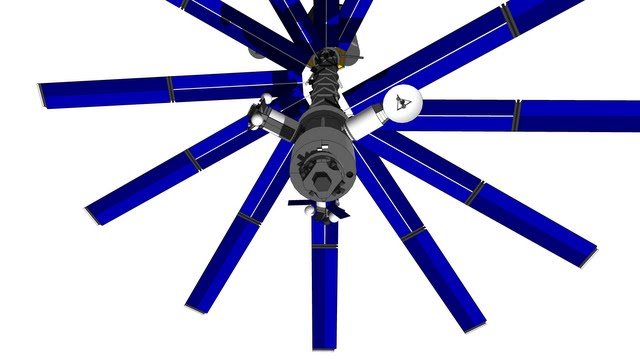

円形の燃料タンクの下に原子炉と推進機構。原子炉は推進剤を加熱する。
放熱板小さかったかも。 原子炉あるなら太陽電池なんて要らない(ry

以上お絵かきでした。 現実路線の宇宙船アートが増えるといいな。
ツール GoogleSketchUp7.1