FUNCube Dongleなど、お手軽で低価格なSDRが増えてきている中で、ちょっと面白いものを見つけた。 その名はRTL-SDR。http://sdr.osmocom.org/trac/wiki/rtl-sdr
10~20ドル帯のTVチューナーが、SDRフロントエンドとして使えるらしい。
その受信機として使えるドングルが届いたので、まずはセットアップしてみた。
 |
| 上が今回入手したチューナー。 下は比較用にFUNCube Dongle pro |
外見はいろいろあるが、重要なのは中身のチップ。 wikiのリストを見るとRTL2832Uが必須で、E4000を搭載したものが推奨とある。 非搭載の製品も見た目はあまり変わらないので、適当に判断すると危ないかもしれない。
今回入手したドングルはeBayでみつけたもの。
既にSDRとしての価値が高まりつつあるらしく、送料含め2500円ほど。 同じような製品なら、Aliexpressのほうがたくさん見つかる上に安い。ただし真偽がわからなかったので、業者がSDRに使えますと謳うほうを選んだ。
入手したものはNewsky社の製品となる。 Aliには直営?サイトがある。
リンク置いときますが、直接取り寄せていないので中身については保証できません。
入手したものはNewsky社の製品となる。 Aliには直営?サイトがある。
リンク置いときますが、直接取り寄せていないので中身については保証できません。
RTL2832Uを使ったワンセグチューナーであれば、日本国内でもっと安いものが買えるようだ(IC名でググると価格.comの質問欄がヒットするので…)。
ソフトウェアのセットアップ
RTL-SDRを使うための環境はいくつか方法があるが、まずはUbuntu10.04にGNU-Radioを入れてみた。
実はサイトをよく読むとスクリプトが提供されているので、それを読みこむとGNU-Radioの設定はほとんど自動だった。 ビルドは十数分掛かったが。
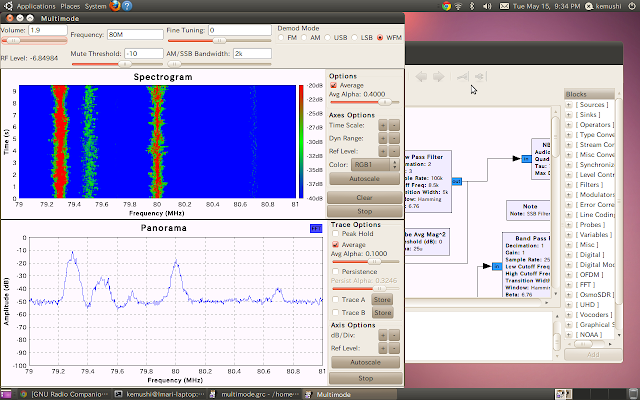
サンプル設定をダウンロードして読み込み、80MHzあたりのFM放送を復調しているところ。信号はTVアンテナ経由。
2MHz帯域を一度に見ているので、ウォーターフォールにはいくつかのラジオ局の信号が同時に見えている。
5年前のVAIO SZだが、WFMの復調を難なくこなしていた。 Atomなネットブックだとさすがに厳しいようですぐ止まってしまう。 帯域を絞ればいけそうな雰囲気だ。
値段の割りに色々と実験できて楽しそうだ。 それにしてもGNUーRadioは面白そうな機能がたくさんある…
今回はここまで。
RTL-SDR本家 http://sdr.osmocom.org/trac/wiki/rtl-sdr
設定などでお世話になったページ(英語)
http://superkuh.com/gnuradio.html
WindowsではHDSDRとSDR#がおすすめ。 SDR#はWideFMが綺麗に聞ける。
チップ情報
 |
| いろいろと付属してきた |
E4000はFUNCube Dongleの要でもある広帯域チューナーICだ。 64~1700MHzの範囲でI/Q信号を出力する。本家サイトを見るとこれとは別のチューナーICを使った製品も結構ある。
その後ろにあるのがRTL2832Uで、デジタル放送の復調を行う。このICにはI/Q信号をそのまま取り込む機能があったため、ドライバをいじることでSDRフロントエンドとして使えた…というカラクリ。 昔トイデジで直接RAW画像を取り込んでいた時を思い出す…。
帯域は広く、約3MHzを一度に観測できる。昔使ったことのあるAR-Alphaが1M帯域だったのを思えばなんだかすごい。
ただしA/Dは8bitしかないのでダイナミックレンジが狭い。CubeSatみたいな弱い信号向きではなさそうだがどうだろう…。 2MHzもあればほとんどのアマチュア衛星の周波数を一度に観測できてしまうから魅力的なんだけども…。
 |
| 比較的余裕のある実装。もっと小さいものも結構ある |
 |
| E4000とRTL2832U |
RTL-SDRを使うための環境はいくつか方法があるが、まずはUbuntu10.04にGNU-Radioを入れてみた。
実はサイトをよく読むとスクリプトが提供されているので、それを読みこむとGNU-Radioの設定はほとんど自動だった。 ビルドは十数分掛かったが。

サンプル設定をダウンロードして読み込み、80MHzあたりのFM放送を復調しているところ。信号はTVアンテナ経由。
2MHz帯域を一度に見ているので、ウォーターフォールにはいくつかのラジオ局の信号が同時に見えている。
5年前のVAIO SZだが、WFMの復調を難なくこなしていた。 Atomなネットブックだとさすがに厳しいようですぐ止まってしまう。 帯域を絞ればいけそうな雰囲気だ。
値段の割りに色々と実験できて楽しそうだ。 それにしてもGNUーRadioは面白そうな機能がたくさんある…
今回はここまで。
RTL-SDR本家 http://sdr.osmocom.org/trac/wiki/rtl-sdr
設定などでお世話になったページ(英語)
http://superkuh.com/gnuradio.html
WindowsではHDSDRとSDR#がおすすめ。 SDR#はWideFMが綺麗に聞ける。
チップ情報
RTL2382U http://www.realtek.com.tw/products/productsView.aspx?Langid=1&PNid=22&PFid=35&Level=4&Conn=3&ProdID=257
後日談
放熱とノイズ低減のために筺体を改造した記事
http://blog.kemushicomputer.com/2012/05/rtl-sdr_24.html
小型衛星の電波を手持ちアンテナで受信してみた記事
http://blog.kemushicomputer.com/2012/05/horyu2-3rtlsdr.html
後日談
放熱とノイズ低減のために筺体を改造した記事
http://blog.kemushicomputer.com/2012/05/rtl-sdr_24.html
小型衛星の電波を手持ちアンテナで受信してみた記事
http://blog.kemushicomputer.com/2012/05/horyu2-3rtlsdr.html